Check Camera Status Before Sending Next Command
The SC2 appears to take quite a bit longer to be ready for the next picture shoot. The V/Z1 is faster in my experience. When you write your own program you should verify that the camera
is ready for the next command with state or status.
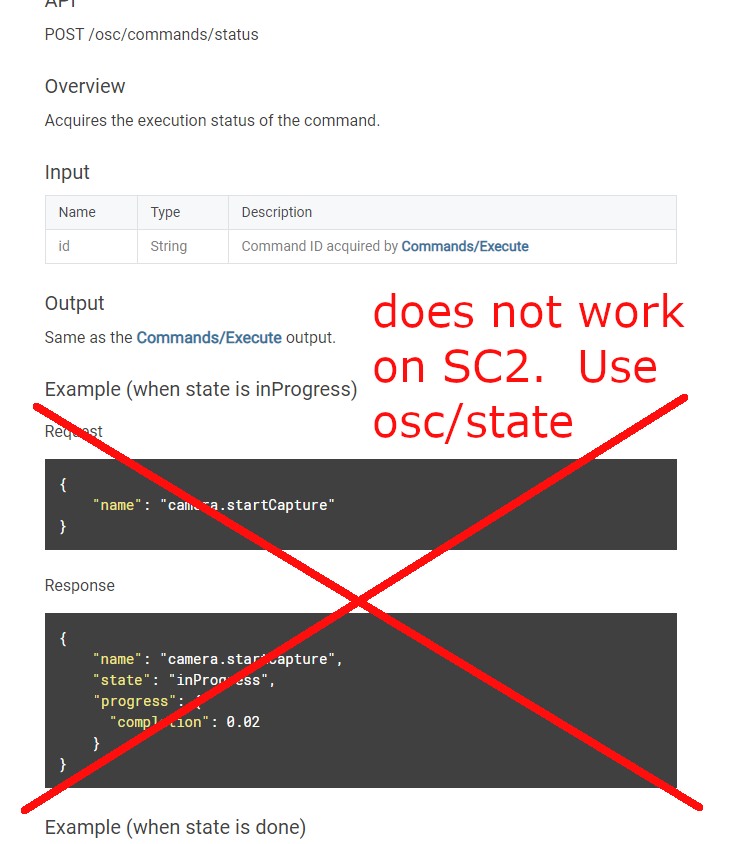
Although both state and status will work for
takePicture in still image mode, you will need to
use state if you use more advanced shots that require startCapture.
Check camera availability with state
The flow of your program will be as follows:
<--- camera.takePicture
----> response
<--- POST /osc/state
----> response _captureStatus: shooting
<--- POST /osc/state
----> response _captureStatus: shooting
<--- POST /osc/state
----> response _captureStatus: shooting
<--- POST /osc/state
----> response _captureStatus: shooting
<--- POST /osc/state
----> response _captureStatus: idle
<--- GET URL *URL = _LatestFileUrl of the state received immediately before
Check camera availability with status
I used a network protocol analyzer log from both the RICOH mobile SDK and the official mobile app to see how these apps check for the readiness of the image to be download. Both apps are using status.
Using status, the steps are:
-
takePicture
-
check on status of takePicture using the state property.
-
if status shows state as inProgress, repeat check
-
If the status shows state as done, get the URL of the laste image taken
-
download file and save to disk.
To use status, you must get the id of the /osc/command from the HTTP response of takePicture.
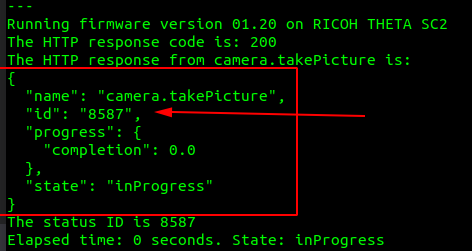
Once you have the id, you can pass it to status.
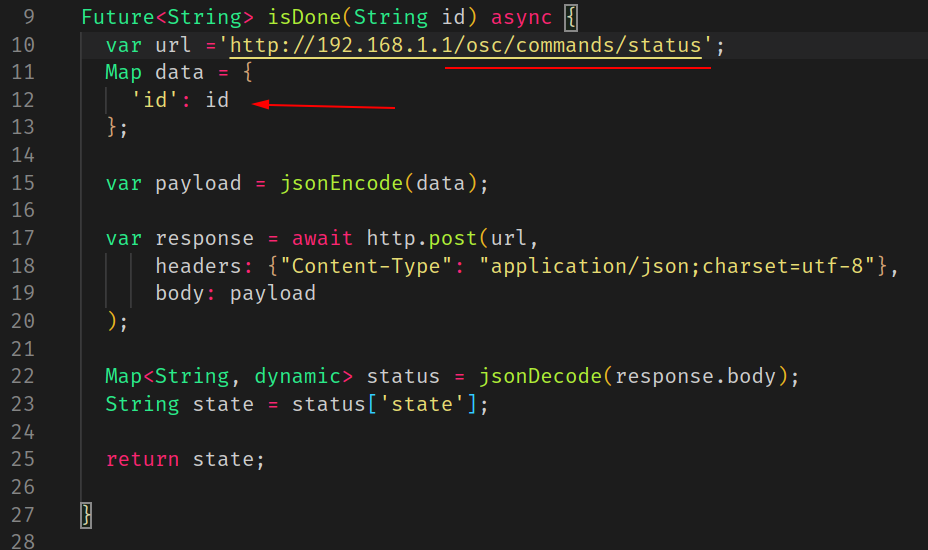
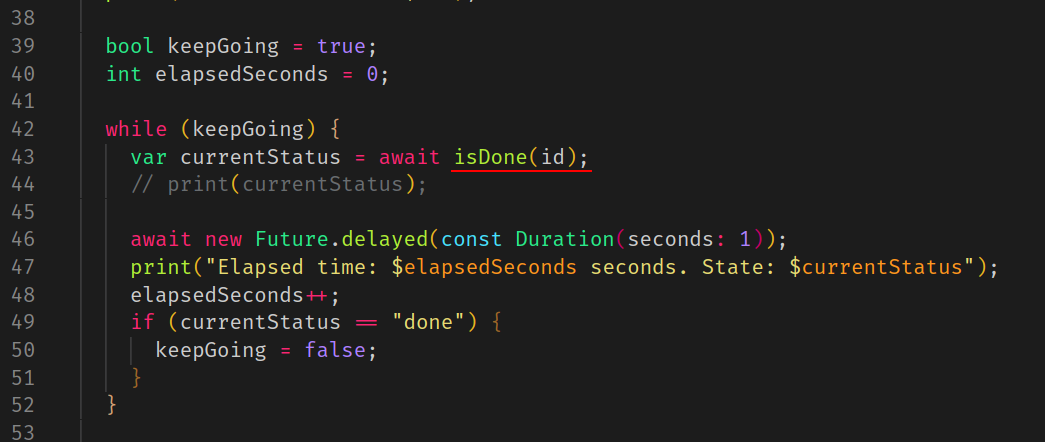
Put the check on the status in a loop with a delay in the loop to avoid overwhelming the camera and your logs.
Here's an example of putting a delay of 1 second into the loop.
Checking Status of startCapture
Community member timbit123 identified a problem using /osc/commands/status to check the completion of start capture.
See his post here.